This ROS2 package contains ROS drivers for the Etherbotix board.
The upload script will reboot the Etherbotix into the bootloader and then upload the new firmware. Be sure to disable drivers before doing this:
ros2 run etherbotix upload /location/of/firmware.bin
In addition to the ROS tools, the low level monitor is available.
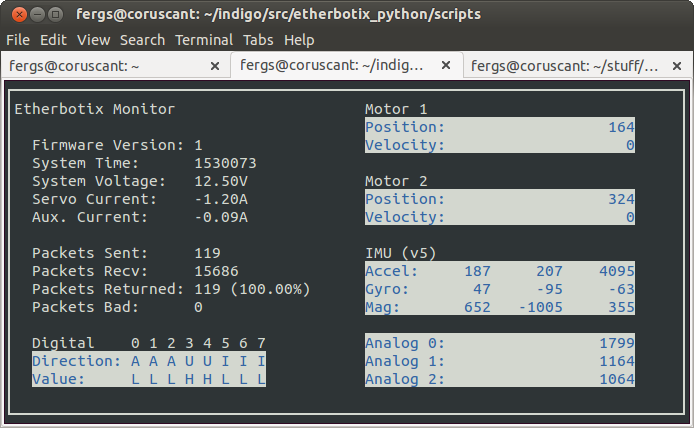
The digital IO section uses the following notation:
- A = analog input
- I/O = digital input or output respectively
- U = pin is in use by user io (SPI, USART, etc)
- H/L = digital status of pin, high or low.