Code for WebRover1 project, part of International Space Apps Challenge 2013, Repurposed and rebuilt by Ryan Vanderwerf for EV3 Platform for Gr8Conf.eu 2014
Original Project page: http://spaceappschallenge.org/project/webrover1/
-
Download Grails 2.2.5 and unzip somewhere suitable or just install GVM (www.gvmtool.net) http://www.grails.org/download
-
Download Ryan's leJOS fork with RMIDifferentialPilot & Gradle support git clone git://git.code.sf.net/u/ryanv78665/lejos u-ryanv78665-lejos
-
Install leJOS on EV3 brick (this was already done -- or see readme!) (see my fork or sd image)
-
Configure robot details in grails-app/conf/Config.groovy
-
Run Grails App
cd lejos-server grails run-app
(or -Dgrails.env=claudia run-app)
- Access from browser
http://localhost:8080/api/forward/1000
- Assumes motors in A and C, sensor in 1 (optional)
{'direction':[left|right|forward|back|stop],
duration:'integer, milliseconds',
distance:'cm',
velocity:integer}
Added Android camera running IP Webcam (address hardwired into HTML page at the moment) http://lifehacker.com/5650095/ip-webcam-turns-your-android-phone-into-a-remote-camera
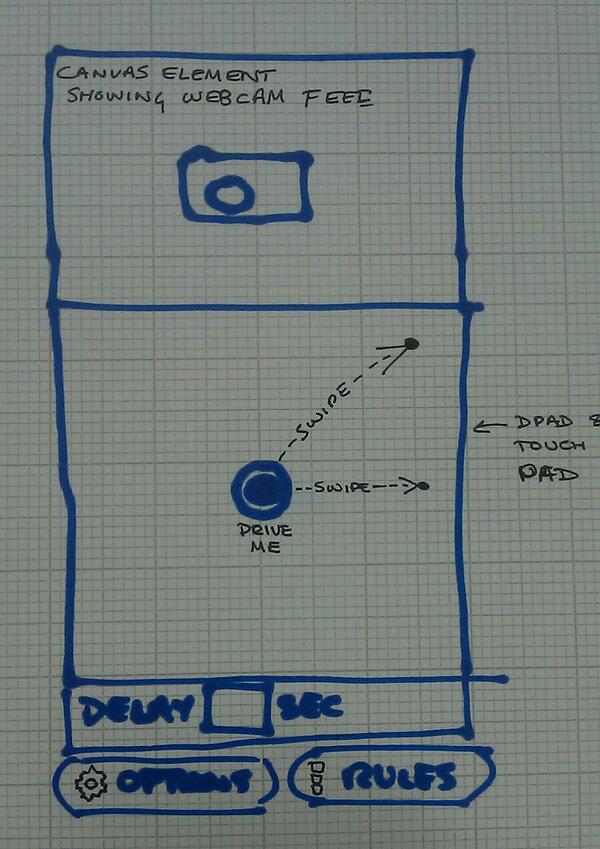
- Web cam feed at the top (if we do a webcam feed)
- D-Pad controller touch area below. User swipes (or click/touch) to tell robot which direction to drive in
- Underneath drive controls, set command delay in seconds
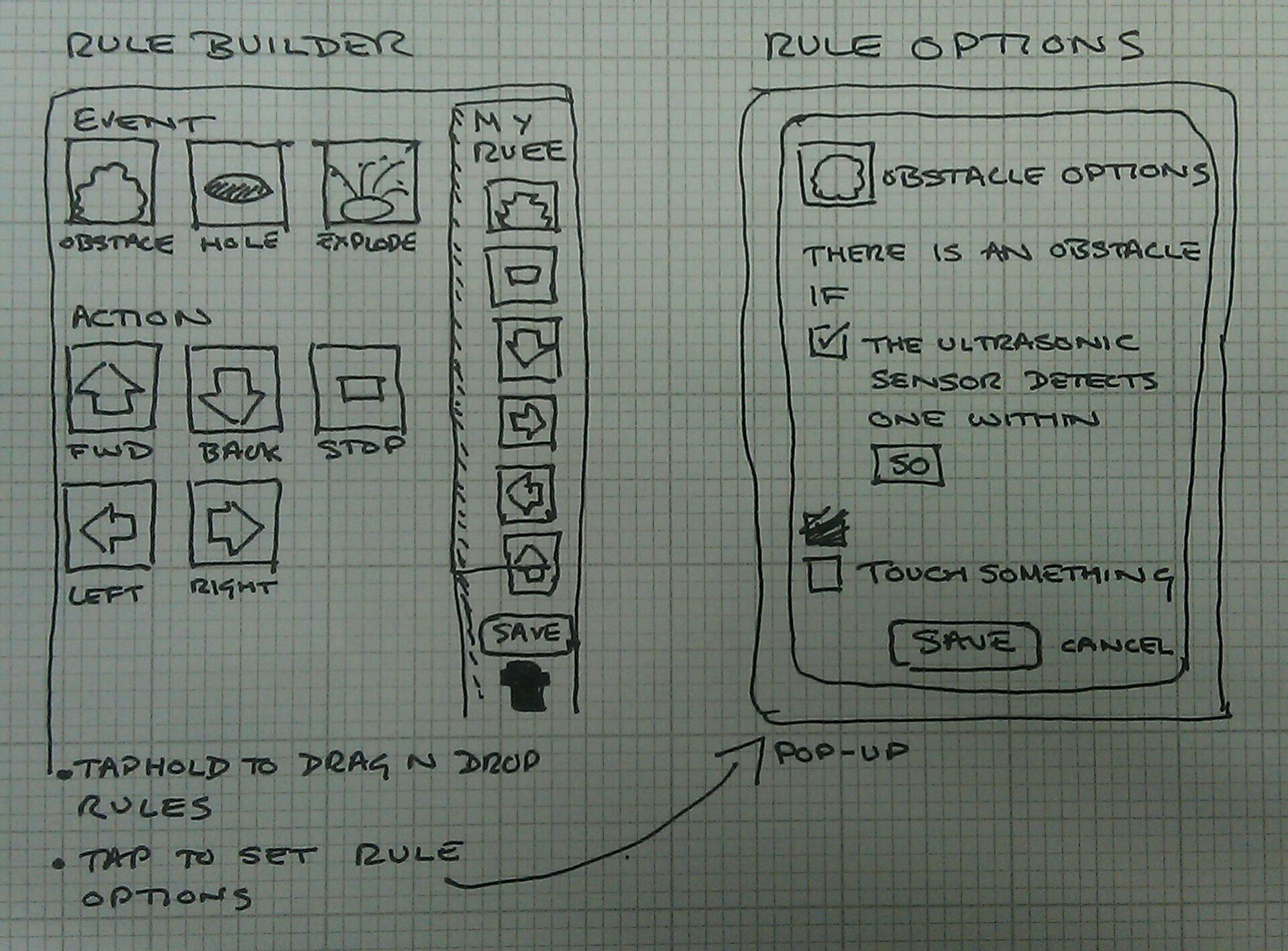
- Under that, buttons to set other options and build your own autonomous rules
Easy rule builder, adapting Tiago Jesus original desktop interface for smaller, mobile devices https://github.com/tiagojesus/LegoRoversUI