home
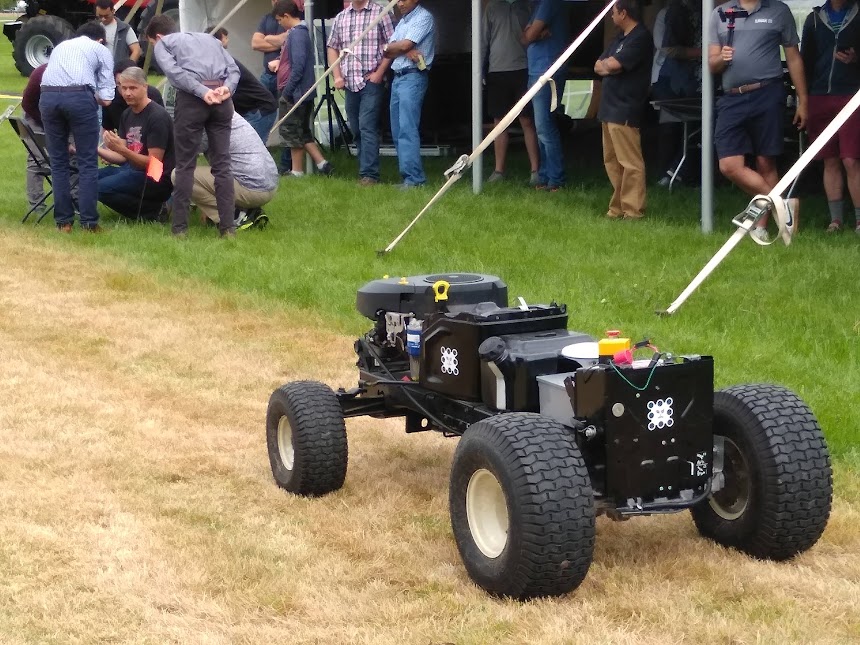
Hola, bienvenidos a la wiki del proyecto ROS Agricultura Argentina. En esta wiki encontraran un esfuerzo por lograr la documentación y estructuración del proyecto y su representación en un caso practico. Ese caso practico es la automatización de un tractor corta pasto con el objetivo de lograr una navegación simple.
Estas son algunas de las secciones principales de la wiki.
- Antecedentes.
- Herramientas.
- Proceso.
- ROS.
- GPS RTK Piksi Multi. *
Para mas información...